










Przekładnie zębate
- BRf ™ Przekładnia zębata do suwnic seria 1-26
- BRc ® Przekładnia zębata dwustopniowa
- BRd ™ Przekładnia zębata trzystopniowa
- BRd-X ™ Przekładnia zębata podnoszenia seria 120-320
- BRe-X ™ Przekładnia zębata podnoszenia seria 210-640
- BRj ™ Przekładnia zębata jazdy wózka i suwnicy seria 30-150
- BRjb ™ Przekładnia zębata jazdy suwnic bramowych seria 30-150
- BRj-X™ Przekładnia zębata jazdy wózka i suwnicy seria 90-250
 Pokaż wszystkie
Pokaż wszystkie
- Kabiny sterownicze
- Zblocza linowe hakowe
- Zestawy kołowe
- Chwytaki
- Bębny linowe
- Falowniki
- Przekładnie zębate
- Hamulec szczękowy AHh ™ AHm ™
- Trawersy
- Łączniki
- Jarzma klinowe
- Hamulec HP 2000 ™
- Koła
- Wciągarki WEh ™ WEh-X ™
- Krążki
- System mocowania szyn G-RAIL, zaciski i podkłady
- Liny i zawiesia
- Izolatory Trakcyjne
- Silniki elektryczne
- Suwnice
- Zasilanie suwnic
- Zawiesia Suwnic
- Kleszcze szynowe
- Kotwice
- Wahacze
- Sprzęgła
- Zderzaki
- Szyny dźwignicowe i osprzęt
- Wózki kablowe
- Wygarniacze kołowe
- Wywrotnice wagonowe
- Przesuwnice wagonowe
- Ładowarko-Koparki
- Taśmociągi
- Elektryczne komponenty
- Verlinde wciągniki wciągarki








Opis produktu
Reduktory zębate walcowe serii BRe-XTM 210-640
SPIS TREŚCI
- Opis
- Dane techniczne
- Oznaczenie reduktora
- Współczynnik doboru wielkości reduktora
- Dobór wielkości reduktora
- Przykłady doboru wielkości reduktora
- Rysunek katalogowy
- Wymiary reduktorów
1. OPIS
Reduktory zębate walcowe serii BRe-XTM są reduktorami dźwignicowymi przeznaczonymi głównie do zastosowania w napędach mechaniznów podnoszenia. Seria BRe-XTM obejmuje wielkości reduktorów od 21-640 o centralach całkowitych od 490-1410 mm, przełożeniach nominalnych od 32-450 i nominalnych momentach wyjściowych od 12 - 340 kNm. Reduktory w zakresie przełożeń 32-125 wykonywane są jako 3-stopniowe, a dla przełożeń 100-450 wykonywane są jako 4-stopniowe. Nośniki reduktorów wyliczono w oparciu o normę ISO 6336. Współczynniki bezpieczeństwa zębów na zginanie i nacisk powierzchniowy mają wartości stosowane dla reduktórów dźwignicowych.1.1. Korpus reduktora
Wykonany jest jako spawany ze stali w gatunku S355 J2. Posiada sztywną o dużej wytrzymałości na zignanie i skręcanie konstrukcję.Umożliwia to:
» czteropunktowe mocowanie korpusu reduktora do ramy nośnej mechanizmu podnoszenia
» wspornikowe mocowanie korpusu reduktora
» podwieszanie reduktora na wale wyjściowym
1.2. Wały i koła zębate
Koła i wały uzębione wykonane sąze stali do nawęglania w gatunku 17CrNlMo6 (17HNM). Wał wyjściowy w komplecie ze sprzęgłem przegubowym wykonane są ze stali do ulepszania cieplnego w gatunku 42CrMo4 (40HM). Uzębienia są nawęglane i szlifowane. Twardość powierzchni zębów 58-62 HRC przy twardości rdzenia 30-40 HRC. Przekładne wykonywane są w klasach dokładności wg DIN 3961 (o wielkościach odpowiednich dla reduktorów dźwignicowych) i zapewniają prawidłową pracę zazębień i cichobieżność reduktorów. Wszystkie stopnie posiadają korygowaną i optymalizowaną geometrię zarysu zębów. Wały i koła zębate wykonywane są wyłącznie z odkuwek z pełnym poświadczeniem składu chemicznego, własności wytrzymałościowych i są badane na obecność wad wewnętrznych.1.3. Łożyska toczne
Ze względu na specyficzne wymagani i warunki pracy reduktorów dźwignicowych zastosowana głównie łożyska barułkowe dwurzędowe, w niektórych przypadkach występują łożyska walcowe jednorzędowe lub walcowe jednorzędowe z pełnąliczbą wałeczków, renomowanych producentów. Zastosowanie powyższych typów łożysk pozwoliło na optymalne wykorzystanie reduktorów serii BRe-XTM, przy zachowaniu wyskiej sprawności całkowitej równej 0,98 dla trzystopniowych i 0,97 dla czterostopniowych.» w niskich i wysokich grupach klasyfikacyjnych M1-M8
» w lekkich i ciężkich warunkach pracy np.: lekie suwnice montażowe i ciężkie suwnice hutniczne
» w niskich i wysokich temperaturach
1.4. Uszczelnienia
Wały wejściowe uszczelnione są pojedynczym pierścienie do promieniowego uszczelniania wału z dodatkową wargą przeciwpyłową. Wały wyjściowe posiadają dwa pierścienie uszczelniające, przestrzeń pomiędzy pierścieniami wypełniona jest smarem stałym. Zastosowane są pierścienie uszczelniąjce wykonane z kauczuku nitrylowego NBR. Płaszczyzny stykowe korpusu oraz pokrywy łożyskowe uszczelniane są produktami firmy LOCTITE.1.5. Smarowanie
W standardowym wykonaniu reduktora, uzębienie i łożyska smarowane są rozbryzgowo olejem dobieranym każdorazowo odpowiednio do warunków pracy. W wykonaniu specjalnym możliwa jest zabudowa dodatkowych elementów poprawiających smarowanie lub zastosowanie pompy oleju.1.6. Zabezpieczenie antykorozyjne
Powierzchnie zewnętrzne i wewnętrzne zabezpieczone są odpowiednimi powłokami antykorozyjnymi zgodnie z Instrukcją producenta.1.7. Kontrola
Wszystkie elementy reduktora przed zamontowaniem podlegją 100% kontroli.1.8. Próba ruchowa
Każdy reduktor po zmontowaniu napełniany jest olejem i poddawany próbie kinematycznej na stanowisku prób. Sprawdza się poprawność pracy i przeprowadza się pomiar głośności pracy reduktora bez obiążenia, napędzanego silnikiem elektrycznym o 3000obr/min.2. DANE TECHNICZNE
Wały wejściowe uszczelnione są pojedynczym pierścienie do promieniowego uszczelniania wału z dodatkową wargą przeciwpyłową. Wały wyjściowe posiadają dwa pierścienie uszczelniające, przestrzeń pomiędzy pierścieniami wypełniona jest smarem stałym. Zastosowane są pierścienie uszczelniąjce wykonane z kauczuku nitrylowego NBR. Płaszczyzny stykowe korpusu oraz pokrywy łożyskowe uszczelniane są produktami firmy LOCTITE.| Nr redukt. | Wielkość reduktora |
Centrala reduktora CC [mm] |
Nominalny moment wyjściowy M2 [kNm] |
Maksymalna siła poprzeczna Pmax [kN] |
Masa reduktora z 1 sprzęgłem przegubowym [kg] |
Ilość oleju [l] |
| 1 | X 210 | 490 | 12 | 70 | 400 | 16 |
| 2 | X 230 | 530 | 16 | 80 | 490 | 22 |
| 3 | 250 | 570 | 21 | 90 | 590 | 26 |
| 4 | 280 | 640 | 28 | 110 | 720 | 30 |
| 5 | 300 | 660 | 32 | 120 | 810 | 39 |
| 6 | 320 | 725 | 42 | 130 | 1050 | 46 |
| 7 | 340 | 770 | 50 | 135 | 1300 | 55 |
| 8 | 360 | 810 | 62 | 140 | 1450 | 67 |
| 9 | 380 | 860 | 72 | 160 | 1680 | 80 |
| 10 | 400 | 900 | 85 | 180 | 2100 | 95 |
| 11 | 430 | 960 | 102 | 200 | 2400 | 120 |
| 12 | 470 | 1030 | 125 | 235 | 3000 | 150 |
| 13 | 500 | 1110 | 160 | 270 | 3800 | 190 |
| 14 | 560 | 1250 | 225 | 320 | 5000 | 280 |
| 15 | 600 | 1330 | 280 | 370 | 6000 | 325 |
| 16 | 640 | 1210 | 340 | 420 | 7000 | 385 |
- Przełożenia nominalne reduktorów dla wszystkich wielkości wynoszą:
- dla zakresu przełożeń 32-125 - reduktory trzystopniowe
32 36 40 45 50 56 63 71 80 90 100 112 125
- dla zakresu przełożeń 100-450 - reduktory czterostopniowe
100 112 125 140 160 180 200 225 250 280 320 360 400 450 - Przełożenia rzeczywiste mogą się różnić od nominalnych +-5%, infomacje o rzeczywistej wartości przełożenia dla konkretnej wielkości reduktora, można uzyskać u producenta.
- Podana masa i ilość oleju są wielkościami orientacyjnymi.
- Zalecany zakres prędkosci wejściowych dla wielkości reduktora:
X210 - X380 wynosi 1000-3000 obr/min.
X400 - X640 wynosi 750-2000 obr/min.
3. OZNACZENIA REDUKTORA
| BRe | X | 320 | 0725 | 050 | A01 | AS | 225M4 | C1 | D1 | WS01 | |||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
- Reduktor do mechanizmu podnoszenia BRe
- Wał wyjściowy z wielowypustowym sprzęgłem bębna linowego X
- Wielkość reduktora 320
- Wielkość centrali całkowitej [mm] 0725
- Przełożenie nominalne 050 - (032-125 reduktor 3-stopniowy) / (100-450 reduktor 4-stopniowy)
- Układ reduktora A01
- Adapter do mocowania silnika kołnierzowego do reduktora AS
- Wielkość silnika (maks. wielkość silnika zależy od wielkości reduktora) 225M4
- Reduktor wyposażony w indukcyjny czujnik prędkości obrotowej C1
- Oznaczenie dodatkowego czopa wału wejściowego reduktora D1
- Dodatkowe oznaczenie wykonania specjalnego reduktora (po uzgodnieniu z producentem)
- Oznaczenie reduktora
- Grupę klasyfikacyjną mech. podnoszenia wg PN-ISO 4301-1 (M, L, T)
- Moc Ns w kW, liczbę obrotów ns w obr/min i wielkość momentu rozruchowego Mr silnika w Nm
- Moment obrotowy od obciążenia na bębnie linowym w kNm i siłę poprzeczną w kN działającą na wał wyjściowy reduktora.
3.1. Uwagi
Producent wykonuje również na bazie reduktorów serii BRe-XTM reduktory spoecjalne na przykład:» z wydłużonym wałem wyjściowym do podwieszenia reduktora
» z przełożeniem reduktorów czterostopniowych 630.
4. WSPÓŁCZYNNIK DOBORU WIELKOŚCI REDUKTORA
Podane poniżej wartości współczynników dotyczą napędu mechanizmu silnikiem elektrycznym zasilanym z przetwornicy częstotliwości. Zastosowanie do napędu silników dwubiegowych wymaga uzgodnień z producentem.Zakres temperatur otoczenia -25oC do +40oC.
(Dla innych temperatur, wykonanie reduktora należy uzgodnić z producentem)
4.1. Współczynniki fa i fr
Zależne od grupy klasyfikacyjnej mechanizmuy w której pracuje reduktor.Grupa klasyfikacyjna mechanizmu wg ISO 4301.
fa - współczynnik pracy - tabela 2
fr - współczynnik momentu rozruchowego - tabela 2
W celu określenia współczynników fa i fr należy przyjąć lub obliczyć współczynnik rozkładu obciążenia Km wg punktu 4.1.1.
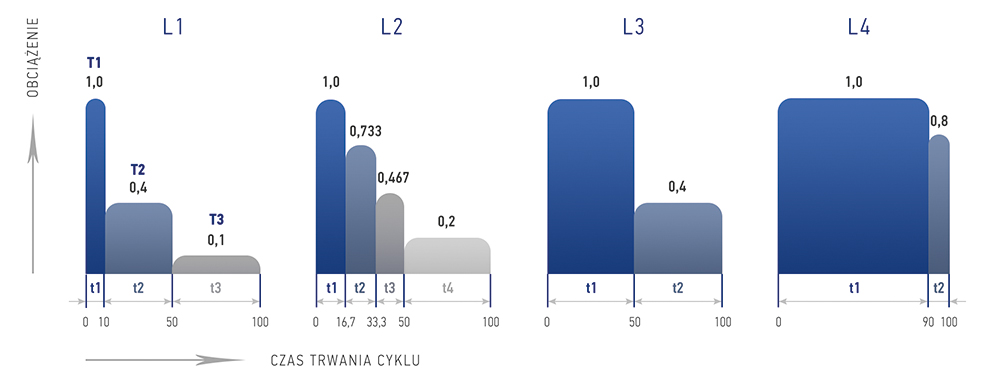
4.1.1 Współczynnik rozkładu obciążenia Km
Km = t1/1 x (T1/T)3 + t2/t x (T2/T)3 + ... + ti/t x (Ti/T)3
t1, t2, ..., ti - średni czas użytkowania reduktora przy danym poziomie obciążenia
t - całkowita suma czasów użytkowania
T1, T2, ..., Ti - wartość obciążenia danego cyklu użytkowania
T - największa wartość obciążenia.
Nominalny współczynnik rozkładu obciążenia reduktora ustala się dobierając do obliczonego współczynnika rozkładu obciążenia najbliższą większą nominalną wartość Km podaną w tabeli 2.
TABELA 2
| Stan obciążenia mechanizmu |
Współczynnik Km |
Charakterystyka obciążenia mechanizmu ISO 4301 |
Klasa wykorzystywania mechanizmu | |||||||||
| T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 | ||||
| Całkowity czas użytkowania mechanizmu [godz] | ||||||||||||
| 200 do 400 |
401 do 800 |
801 do 1600 |
1601 do 3200 |
3201 do 6300 |
6301 do 12500 |
12501 do 25000 |
25001 do 50000 |
50001 do 100000 |
||||
| Grupa klasyfikacyjna mechanizmu | ||||||||||||
| L1 Lekki |
0,125 | Mechanizmy podlegające bardzo rzadko maksymalnemu obciążeniu, a przeważnie małym obciążeniom |
M1 | M1 | M2 | M3 | M4 | M5 | M6 | M7 | M8 | |
| fa | 0,8 | 0,8 | 0,8 | 0,8 | 0,9 | 1,0 | 1,0 | 1,1 | 1,3 | |||
| fr | 0,5 | 0,5 | 0,5 | 0,5 | 0,55 | 0,6 | 0,65 | 0,75 | 0,8 | |||
| L2 Średni |
0,25 | Mechanizmy podlegające niezbyt często maksymalnemu obciążeniu, a przeważnie przeciętnym obciążeniom |
M1 | M2 | M3 | M4 | M5 | M6 | M7 | M8 | M8 | |
| fa | 0,8 | 0,8 | 0,9 | 0,9 | 1,0 | 1,1 | 1,2 | 1,3 | 1,4 | |||
| fr | 0,5 | 0,5 | 0,5 | 0,5 | 0,55 | 0,6 | 0,65 | 0,75 | 0,8 | |||
| L3 Ciężki |
0,50 | Mechanizmy podlegające często maksymalnemu obciążeniu, a przeważnie dużym obciążeniom |
M2 | M3 | M4 | M5 | M6 | M7 | M8 | M8 | M8 | |
| fa | 0,8 | 0,9 | 1,0 | 1,0 | 1,1 | 1,2 | 1,3 | 1,5 | 1,8 | |||
| fr | 0,5 | 0,5 | 0,55 | 0,55 | 0,6 | 0,65 | 0,75 | 0,85 | 1,0 | |||
| L4 Bardzo ciężki |
1,00 | Mechanizmy podlegające regularnie maksymalnemu obciążeniu |
M3 | M4 | M5 | M6 | M7 | M8 | M8 | M8 | M8 | |
| fa | 0,9 | 1,0 | 1,1 | 1,2 | 1,3 | 1,4 | 1,7 | 2,0 | 2,2 | |||
| fr | 0,5 | 0,55 | 0,55 | 0,6 | 0,7 | 0,75 | 0,85 | 0,95 | 1,1 | |||
4.2. Współczynnik fz
Zależny od liczby załączeń reduktora na godzinę.TABELA 3
| Liczba załączeń / godzinę |
<10 | 11-60 | 61-150 | 151-200 | 201-320 | |
| fz | ||||||
| Współczynnik fa |
0,8 - 0,9 | 1,0 | 1,2 | 1,4 | - | - |
| 1,0 - 1,1 | 1,0 | 1,1 | 1,2 | 1,4 | - | |
| 1,2 - 1,4 | 1,0 | 1,1 | 1,1 | 1,2 | 1,4 | |
| 1,5 - 1,7 | 1,0 | 1,0 | 1,0 | 1,0 | 1,4 | |
| 2,0 - 2,2 | 1,0 | 1,0 | 1,0 | 1,0 | 1,0 | |
5. DOBÓR WIELKOŚCI REDUKTORA
Warunek nominalnego momentu wyjściowego m2 reduktoraReduktor dobieramy z warunku nominalnego momentu wyjściowego:
M2 > Mobc x fa x fz
Warunek momentu rozruchowego Mr silnika
Mr x fr x in < M2
Warunek siły poprzecznej p2 działającej na wał wyjściowy
P2 < Pmax / (fa x fz)
Maksymalna moc wyjściowa N2 reduktora
Wielkość wyjściowej mocy maksymalnej reduktora wyliczamy z zależności:
N2 = M2 x ns / (in x 9,55)
M2 - nominalny moment wyjściowy reduktora [kNm] tabela 1
N2 - nominalna moc wyjściowa reduktora [kW]
Mobc - moment obciążenia na wale wyjściowym [kNm]
P2 - siła poprzeczna na wale wyjściowym [kNm]
Pmax - maksymalna siła poprzeczna na wale wyjściowym [kNm] tabela 1
Ns - moc silnika elektrycznego [kW]
ns - obroty nominalne silnika [kNm]
Mr - moment rozruchowy silnika [kNm]
in - przełożenie nominalne reduktora
fa, fz, fr - współczynnik doboru tabela 2 / 3
6. PRZYKŁADY DOBORU WIELKOŚCI REDUKTORA
6.1. Mechanizm podnoszenia - przykład 1
| DANE: | |
| Napęd mechanizmu silnikiem elektrycznym zasilanym z przetwornicy częstotliwości moc silnika Ns = 90kW, obroty ns=1485 obr/min, moment rozruchowy Mr = 0,87 kNm |
|
| Przeciętny czas pracy mechanizmu na dobę 2,0 godz. |
Liczba załączeń na godzinę do 50 |
| Przeciętna liczba dni pracy mechanizmu w roku 250 dni |
Moment obciążenia Mobc = 50 kNm (moment na bębnie linowym) |
| Okres eksploatacji mechanizmu 20 lat |
Siła poprzeczna działająca na wał wyjściowy P2 = 50kN |
| Nominalny współczynnik rozkładu obciążenia Km = 0,25 (Klasa obciążenia mechanizmu L2) |
Przełożenie nominalne reduktora in = 90 |
Dla powyższych danych wyliczamy całkowity czas użytkowania mechanizmu w godzinach i dla Km=0,25 wg ISO 4301 określamy klasę wykorzystania i grupę klasyfikacyjną mechanizmu.
2,0 x 250 x20 = 10 000 godzin
Klasa obciążenia mechanizmu - L2,
Klasa wykorzystania mechanizmu - T6,
Grupa klasyfikacyjna mechanizmu - M6.
Z tabel 2 i 3 współczynniki dla powyższych danych wynoszą:
fa = 1,1 dla GKM M6-L6, T6
fr = 0,6 dla GKM M6-L2, T6
fz = 1,1 dla liczby załączeń do 50 zał./godz.
Wymagany minimalny, nominalny moment wyjściowy reduktora
M2 > 50 x 1,1 x 1,1 = 60,5 kNm
Wybrano reduktor wielkości BRe-X3600810,
trzystopniowy in = 90 dla którego nominalny moment wyjściowy M2 wynosi 62 kNm,
a maksymalna siła poprzeczna Pmax wynosi 130 kN.
Dla wybranej wielkości reduktora sprawdzamy warunek momentu rozruchowego silnika i siły poprzecznej.
Mr x fr x in = 0,87 x 0,6 x90 = 47 kNm < M2 = 62 kNm
P2 = 50 kN < Pmax / (fa x fz) = 130 / (1,1 x 1,1) = 107,4 kN
P2 = 50 kN < Pmax / (fa x fz) = 130 / (1,1 x 1,1) = 107,4 kN
Wybrana wielkość reduktora spełnia wymagane warunki.
Nominalna moc wyjściowa reduktora wynosi:
N2 = 62 x 1485 / (90 x 9,55) = 107,0 kW
6.2. Mechanizm podnoszenia - przykład 2
| DANE: | |
| Napęd mechanizmu silnikiem elektrycznym zasilanym z przetwornicy częstotliwości moc silnika Ns = 132kW, obroty ns=990 obr/min, moment rozruchowy Mr = 1,9 kNm |
|
| Przeciętny czas pracy mechanizmu na dobę 16,0 godz. |
Liczba załączeń na godzinę do 120 |
| Przeciętna liczba dni pracy mechanizmu w roku 300 dni |
Moment obciążenia Mobc = 150 kNm (moment na bębnie linowym) |
| Okres eksploatacji mechanizmu 20 lat |
Siła poprzeczna działająca na wał wyjściowy P2 = 200kN |
| Nominalny współczynnik rozkładu obciążenia Km = 1,0 (Klasa obciążenia mechanizmu L4) |
Przełożenie nominalne reduktora in = 160 |
Dla powyższych danych wyliczamy całkowity czas użytkowania mechanizmu w godzinach i dla Km=1,0 wg ISO 4301 określamy klasę wykorzystania i grupę klasyfikacyjną mechanizmu.
16,0 x 300 x 20 = 96 000 godzin
Klasa obciążenia mechanizmu - L4,
Klasa wykorzystania mechanizmu - T9,
Grupa klasyfikacyjna mechanizmu - M8.
Z tabel 2 i 3 współczynniki dla powyższych danych wynoszą:
fa = 2,2 dla GKM M8-L4,T9
fr = 1,1 dla GKM M8-L4, T9
fz = 1,0 dla liczby załączeń do 120 zał./godz.
Wymagany minimalny, nominalny moment wyjściowy reduktora
M2 > 150 x 2,2 x 1,0 = 330,0 kNm
Wybrano reduktor wielkości BRe-X6401410,
czterostopniowy in = 160 dla którego nominalny moment wyjściowy M2 wynosi 340 kNm,
a maksymalna siła poprzeczna Pmax wynosi 400 kN.
Dla wybranej wielkości reduktora sprawdzamy warunek momentu rozruchowego silnika i siły poprzecznej.
Mr x fr x in = 1,9 x 1,1 x 160 = 334,4 kNm < M2 = 340 kNm
Wybrana wielkość reduktora spełnia wymagane warunki.
Nominalna moc wyjściowa reduktora wynosi:
N2 = 340 x 990 / (160 x 9,55) = 220,3 kW
7. RYSUNEK KATALOGOWY
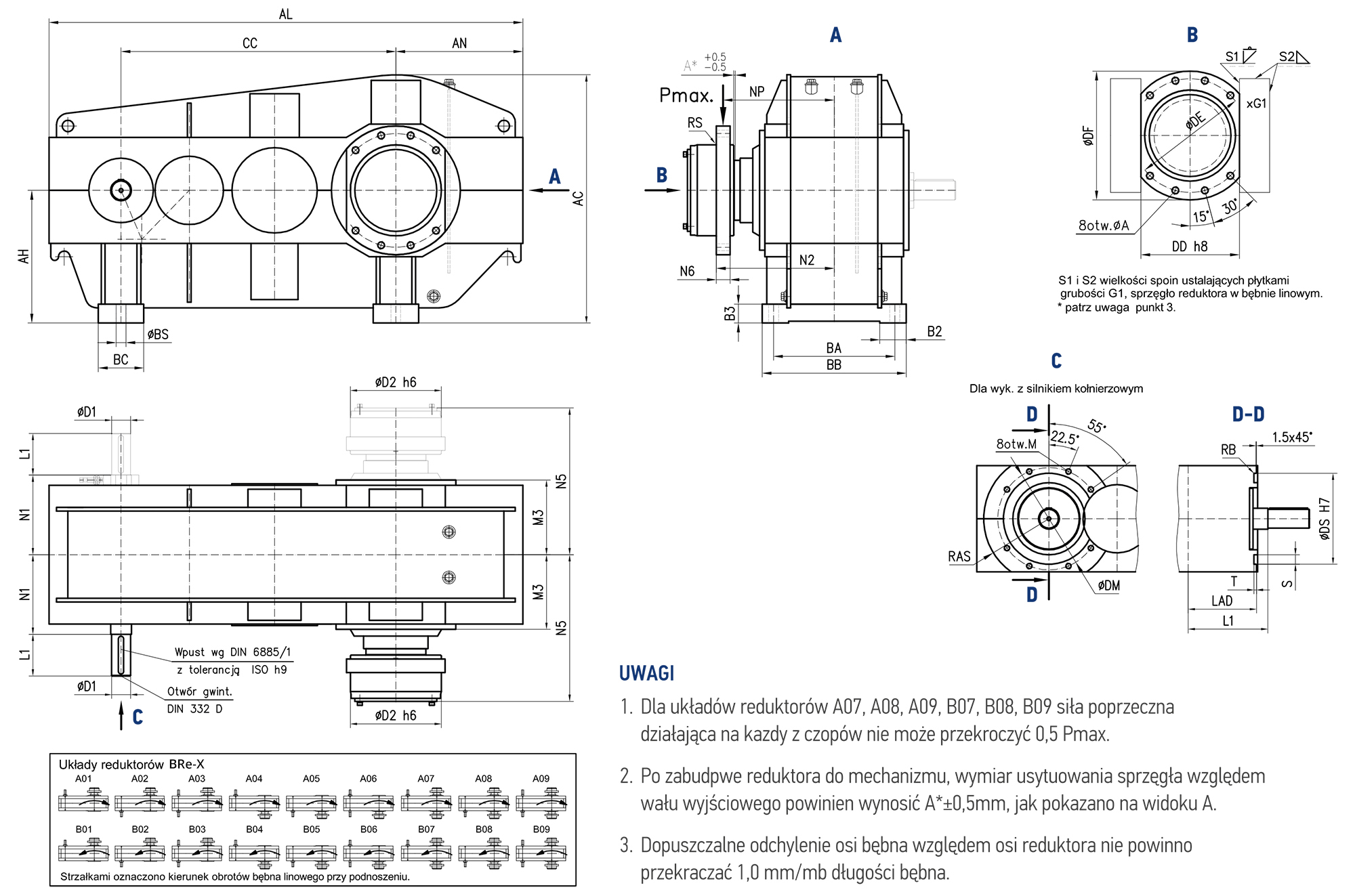
8. WYMIARY REDUKTORÓW
| Reduktory zębate walcowe BRe-XTM 210-640 | |||||||||||||||||||||||||||
| Nr reduktora |
Wielkość reduktora |
CC | AC | AH | AL | AN | BA | BB | BC | ØBS | B2 | B3 | Wał wejściowy | Wał wyjściowy | M3 | N1 | N5 | N6 | NP | RS | Wielkość reduktora |
||||||
| in=32-56 | in=63-160 | in=180-450 | |||||||||||||||||||||||||
| ØD1 | L1 | ØD1 | L1 | ØD1 | L1 | ØD2 | N2 | ||||||||||||||||||||
| 1 | 210 | 490 | 470 | 245 | 880 | 230 | 230 | 270 | 100 | 18 | 45 | 30 | 35 | 80 | 40 | 80 | 30 | 80 | 160 | 215 | 144 | 160 | 273 | 30 | 20 | 1 | 210 |
| 2 | 230 | 530 | 500 | 260 | 950 | 250 | 250 | 290 | 100 | 18 | 55 | 30 | 40 | 110 | 40 | 80 | 35 | 80 | 170 | 220 | 149 | 170 | 279 | 30 | 205 | 1 | 230 |
| 3 | 250 | 570 | 525 | 280 | 1020 | 270 | 260 | 310 | 100 | 22 | 60 | 35 | 40 | 80 | 40 | 80 | 35 | 80 | 180 | 235 | 161 | 185 | 298 | 30 | 220 | 1 | 250 |
| 4 | 280 | 640 | 565 | 300 | 1118 | 298 | 300 | 350 | 100 | 22 | 65 | 35 | 50 | 110 | 45 | 110 | 40 | 80 | 220 | 260 | 169 | 190 | 326 | 34 | 243 | 1 | 280 |
| 5 | 300 | 660 | 605 | 320 | 1155 | 315 | 300 | 350 | 100 | 22 | 70 | 40 | 50 | 110 | 45 | 110 | 40 | 80 | 230 | 275 | 180 | 200 | 341 | 36 | 257 | 1 | 300 |
| 6 | 320 | 725 | 655 | 350 | 1250 | 335 | 320 | 380 | 120 | 26 | 70 | 50 | 55 | 110 | 50 | 110 | 45 | 110 | 240 | 290 | 197 | 210 | 366 | 36 | 272 | 1 | 320 |
| 7 | 340 | 770 | 700 | 370 | 1335 | 365 | 340 | 400 | 120 | 26 | 75 | 50 | 60 | 140 | 55 | 110 | 50 | 110 | 260 | 305 | 213 | 230 | 385 | 36 | 287 | 1 | 340 |
| 8 | 360 | 810 | 745 | 390 | 1390 | 380 | 360 | 420 | 120 | 26 | 80 | 53 | 60 | 140 | 55 | 110 | 50 | 110 | 270 | 320 | 226 | 240 | 408 | 36 | 302 | 1 | 360 |
| 9 | 380 | 860 | 771 | 410 | 1460 | 400 | 380 | 440 | 120 | 26 | 85 | 58 | 65 | 140 | 60 | 140 | 55 | 110 | 280 | 330 | 263 | 260 | 422 | 36 | 312 | 1 | 380 |
| 10 | 400 | 900 | 810 | 430 | 1570 | 420 | 420 | 484 | 140 | 26 | 100 | 60 | 70 | 140 | 65 | 140 | 60 | 140 | 310 | 355 | 255 | 290 | 455 | 40 | 335 | 1 | 400 |
| 11 | 430 | 960 | 870 | 460 | 1670 | 420 | 420 | 484 | 140 | 26 | 100 | 60 | 70 | 140 | 65 | 140 | 60 | 140 | 320 | 370 | 268 | 300 | 472 | 40 | 350 | 1 | 430 |
| 12 | 470 | 1030 | 945 | 500 | 1805 | 495 | 480 | 564 | 170 | 34 | 110 | 65 | 75 | 140 | 70 | 140 | 65 | 140 | 350 | 420 | 300 | 330 | 529 | 44 | 398 | 1 | 470 |
| 13 | 500 | 1110 | 995 | 525 | 1930 | 520 | 520 | 620 | 180 | 34 | 130 | 65 | 80 | 170 | 75 | 140 | 70 | 140 | 350 | 440 | 318 | 340 | 569 | 44 | 418 | 1 | 500 |
| 14 | 560 | 1250 | 1115 | 590 | 2170 | 590 | 600 | 700 | 200 | 40 | 150 | 70 | 85 | 170 | 80 | 170 | 75 | 140 | 400 | 490 | 362 | 380 | 624 | 48 | 464 | 1 | 560 |
| 15 | 600 | 1330 | 1200 | 630 | 2300 | 630 | 620 | 730 | 220 | 40 | 150 | 70 | 95 | 170 | 85 | 170 | 80 | 170 | 430 | 520 | 377 | 390 | 657 | 60 | 490 | 1,5 | 600 |
| 16 | 640 | 1410 | 1275 | 670 | 2430 | 670 | 670 | 770 | 250 | 2x34 | 150 | 75 | 100 | 210 | 90 | 170 | 80 | 170 | 450 | 560 | 417 | 440 | 701 | 60 | 530 | 2 | 640 |
| Wymiary zabudowy adaptera silnika kołnierzowego | Wymiary zabudowy sprzęgła przegubowego | ||||||||||||||||||
| Nr reduktora |
Wielkość reduktora |
Maks. wielkość silnika IEC |
ØDM | ØDSH7 | LAD | RAS | Mxg (8x) | T | RB | S | A* | ØA | DDh8 | ØDE | ØDF | G1 | S1 | S2 | Wielkość reduktora |
| 1 | 210 | 200 | 210 | 180 | 131 | 118 | M12x25 | 5 | 1 | 15 | 1 | 14 | 170 | 190 | 220 | 8 | 6 | 4 | 210 |
| 2 | 230 | 225 | 240 | 210 | 136 | 135 | M12x25 | 5 | 1 | 15 | 1 | 14 | 180 | 210 | 250 | 8 | 6 | 4 | 230 |
| 3 | 250 | 225 | 250 | 220 | 153 | 154 | M12x30 | 7 | 1 | 15 | 1 | 14 | 190 | 220 | 260 | 10 | 8 | 5 | 250 |
| 4 | 280 | 280 | 250 | 220 | 157 | 154 | M16x30 | 7 | 1 | 15 | 1 | 18 | 240 | 280 | 320 | 12 | 8 | 6 | 280 |
| 5 | 300 | 280 | 270 | 240 | 168 | 170 | M16x30 | 8 | 1 | 15 | 1 | 18 | 250 | 290 | 330 | 12 | 8 | 6 | 300 |
| 6 | 320 | 280 | 270 | 240 | 180 | 170 | M16x35 | 8 | 1 | 20 | 1 | 18 | 260 | 300 | 340 | 12 | 8 | 6 | 320 |
| 7 | 340 | 280 | 280 | 250 | 200 | 171 | M16x35 | 8 | 1 | 25 | 1 | 18 | 280 | 320 | 360 | 12 | 8 | 6 | 340 |
| 8 | 360 | 280 | 280 | 250 | 209 | 171 | M16x35 | 8 | 1 | 25 | 1 | 18 | 290 | 330 | 370 | 12 | 8 | 6 | 360 |
| 9 | 380 | 280 | 280 | 250 | 219 | 171 | M16x35 | 8 | 1 | 25 | 1 | 18 | 300 | 350 | 400 | 16 | 12 | 10 | 380 |
| 10 | 400 | 280 | 320 | 290 | 234 | 191 | M20x45 | 8 | 1 | 25 | 2 | 22 | 330 | 380 | 430 | 16 | 12 | 10 | 400 |
| 11 | 430 | 280 | 320 | 290 | 252 | 193 | M20x45 | 8 | 1 | 25 | 2 | 22 | 350 | 400 | 450 | 16 | 12 | 10 | 430 |
| 12 | 470 | 315 | 350 | 320 | 270 | 218 | M20x45 | 8 | 1 | 25 | 2 | 22 | 360 | 410 | 470 | 16 | 12 | 10 | 470 |
| 13 | 500 | 315 | 350 | 320 | 297 | 218 | M20x45 | 8 | 1 | 25 | 2 | 22 | 370 | 420 | 490 | 16 | 12 | 10 | 500 |
| 14 | 560 | 355 | 400 | 360 | 337 | 245 | M20x45 | 10 | 1,5 | 25 | 2 | 22 | 430 | 470 | 450 | 20 | 16 | 12 | 560 |
| 15 | 600 | 355 | 400 | 360 | 352 | 245 | M20x50 | 10 | 1,5 | 25 | 2 | 22 | 460 | 500 | 570 | 20 | 16 | 12 | 600 |
| 16 | 640 | 355 | 410 | 360 | 391 | 250 | M24x60 | 10 | 1,5 | 30 | 2 | 26 | 480 | 520 | 590 | 20 | 16 | 12 | 640 |
CENTRUM PROJEKTOWO-WDROŻENIOWE DETRANS Spółka z o.o.w Zabrzu jest kontynuatorem zadań realizowanych przez zlikwidowany instytut badawczy Ośrodek Badawczo-Rozwojowy Dźwignic i Urządzeń Transportowych "Detrans".
Realizuje prace projektowe i wdrożeniowe w zakresie zaawansowanych technologii z obszarów: budowy i eksploatacji dźwignic, maszyn przeładunkowo-transportowych, ochrony środowiska, inżynierii systemów oraz metodologii badań naukowych w tym zakresie.
Realizuje prace projektowe i wdrożeniowe w zakresie zaawansowanych technologii z obszarów: budowy i eksploatacji dźwignic, maszyn przeładunkowo-transportowych, ochrony środowiska, inżynierii systemów oraz metodologii badań naukowych w tym zakresie.
DETRANS Spółka z o.o. opracowuje dokumentacje techniczne różnych rodzajów dźwignic, zawiesi, urządzeń i maszyn przeładunkowych i transportowych. Spółka wyspecjalizowała się przede wszystkim w dźwignicach. Opracowywane są typoszeregi podstawowych elementów dźwignic jak sprzęgła, hamulce, koła jezdne, zderzaki, zblocza, jarzma linowe, łączniki różnicowe i wiele innych wynikających z potrzeb klientów.
